
Multi-Robot Systems (MRS)
Multi-Robot Systems (MRS) involve the coordination and cooperation of multiple autonomous robots working together to accomplish tasks that are difficult or inefficient for a single robot to perform alone. These systems emphasize decentralized decision-making, robust communication, and dynamic task allocation to adapt to changing environments and mission demands.
Research in MRS spans a wide range of topics, including multi-agent coordination and control, distributed perception and mapping, task planning and scheduling, communication protocols for robot-to-robot interaction, and resilience in the face of uncertainty or individual robot failures. Fundamental challenges include designing scalable algorithms, ensuring real-time adaptability, and managing the trade-offs between autonomy, cooperation, and system-level performance. MRS research integrates concepts from robotics, artificial intelligence, control theory, and systems engineering to enable effective teamwork among large groups of autonomous agents.
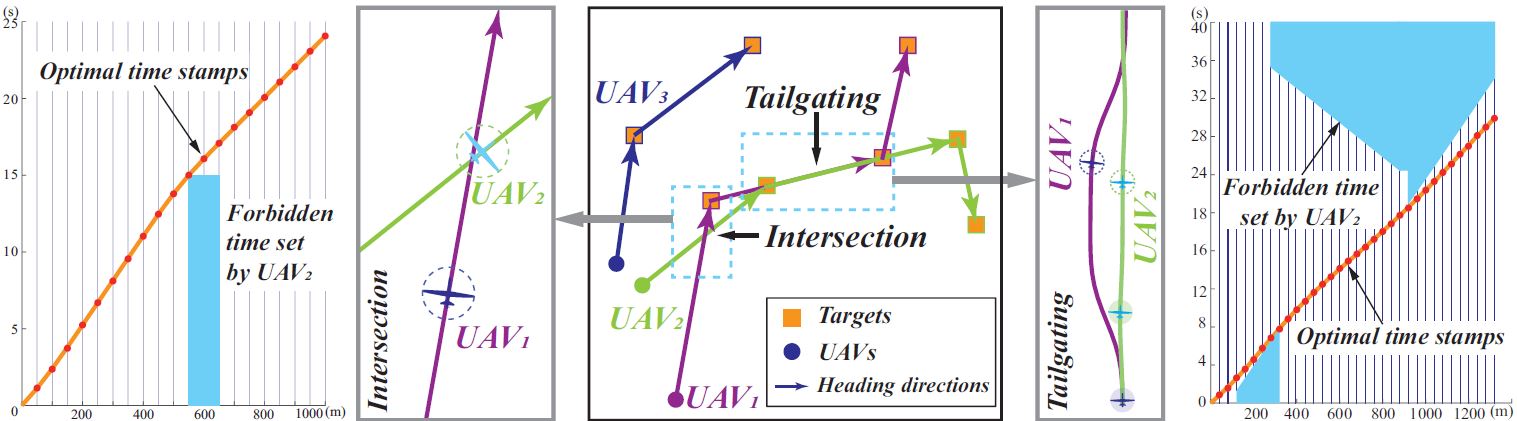
- Multi-Task Allocation Framework with Spatial Dislocation Collision Avoidance for Multiple Aerial Robots
- On the Problems of Drone Formation and Light Shows
- Bio-Inspired Intelligence-Based Multi-Agent Navigation with Safety-Aware Considerations
- A Convex Optimization Approach to Multi-Robot Task Allocation and Path Planning
- Multi-Robot Directed Coverage Path Planning in Row-Based Environments